Getting started¶
Jupyter notebook version of this page can be downloaded here.
The latest stable version of PyRigi can be installed by
pip install pyrigi
More detailed installation instructions can be found here.
Once the package is installed, the basic classes Graph and Framework can be imported as follows:
from pyrigi import Graph, Framework
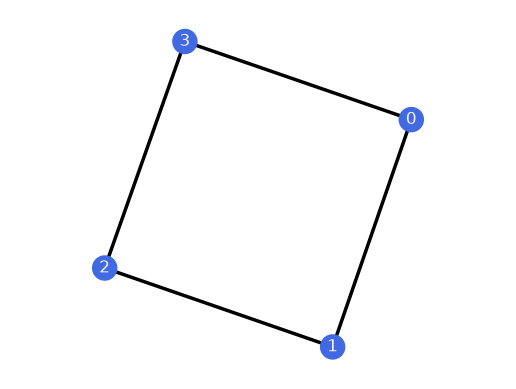
We can specify a graph by its list of edges, see this tutorial for more options.
G = Graph([(0,1), (1,2), (2,3), (0,3)])
G
Graph.from_vertices_and_edges([0, 1, 2, 3], [(0, 1), (0, 3), (1, 2), (2, 3)])
G.plot()
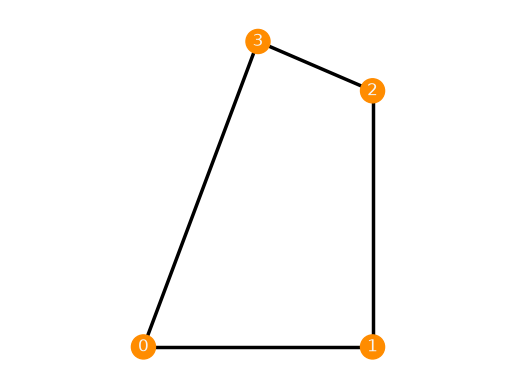
Having graph G, we can construct a framework.
F = Framework(G, {0:[0,0], 1:[1,0], 2:[1,'1/2 * sqrt(5)'], 3:[1/2,'4/3']})
F
Framework(Graph.from_vertices_and_edges([0, 1, 2, 3], [(0, 1), (0, 3), (1, 2), (2, 3)]), {0: ['0', '0'], 1: ['1', '0'], 2: ['1', 'sqrt(5)/2'], 3: ['0.500000000000000', '4/3']})
Notice that in order to keep the coordinates symbolic, they must be entered as strings (or SymPy expressions).
We can plot frameworks and graphs, see also the Plotting tutorial.
F.plot()
Positions of vertices can be read using square brackets:
F[2]
There are also some predefined graphs and frameworks, see graphDB and frameworkDB (also this tutorial)
import pyrigi.frameworkDB as frameworks
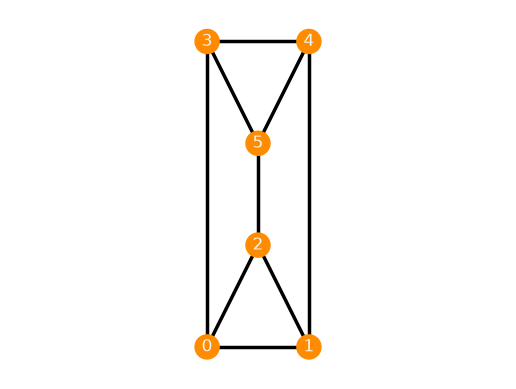
TP_inf_flex = frameworks.ThreePrism('parallel')
TP_inf_flex.plot()
There is also a possibility to draw a graph using mouse.
Rigidity properties¶
Various rigidity properties can be checked by calling class methods, some examples are below. See also this tutorial.
Infinitesimal rigidity¶
The framework of 3-prism created above is infinitesimally flexible.
TP_inf_flex.is_inf_rigid()
False
It has the following rigidity matrix:
TP_inf_flex.rigidity_matrix()
The space of nontrivial infinitesimal flexes is generated by:
TP_inf_flex.nontrivial_inf_flexes()
[Matrix([
[1],
[0],
[1],
[0],
[1],
[0],
[0],
[0],
[0],
[0],
[0],
[0]])]
Generic rigidity¶
Now we retrieve the underlying graph and check that it is (generically) 2-rigid.
G_TP = TP_inf_flex.graph
G_TP.is_rigid()
True
It is also (generically) 1-rigid.
G_TP.is_rigid(dim=1)
True
No combinatorial characterization is known for 3-rigidity, but a randomized algorithm can be used based on Theorem 4.
G_TP.is_rigid(dim=3, algorithm="randomized")
False
We can check also {prf:ref}`global <def-globally-rigid-graph>` or {prf:ref}`redundant <def-redundantly-rigid-graph>` rigidity:
G_TP.is_globally_rigid()
False
G_TP.is_redundantly_rigid()
False